纤毛是从某些细胞表面延伸出来的感觉结构。这些毛发状结构被认为有助于各种生物体(包括人类)的感觉运动能力。为了发挥生理功能,纤毛必须同
纤毛是从某些细胞表面延伸出来的感觉结构。这些毛发状结构被认为有助于各种生物体(包括人类)的感觉运动能力。
为了发挥生理功能,纤毛必须同步跳动。尽管过去有许多研究致力于探索纤毛同步,但其生物和机械基础尚未完全了解。部分原因是在活体样本中和受控实验条件下研究纤毛很困难。
中国科学院物理研究所的研究人员最近推出了一个新平台,可用于重现纤毛的力学原理并在受控环境中研究其行为。他们提出的纤毛建模系统发表在《物理评论快报》上,该系统由名为 HEXBUG 的自推进机器人链组成。
论文共同作者杨明成告诉 Phys.org:“该项目源于夏一明和胡子贤为了好玩而构建的 HEXBUG 机器人链,它们最初用于研究自推进剂的集体运动。”
“令人惊讶的是,他们发现两个锚定在共用碱基上的 HEXBUG 链可以同步跳动。我们立即意识到,锚定的 HEXBUG 链的行为类似于生物纤毛,可用于研究仅由机械耦合(即没有流体动力学效应)引起的纤毛之间的同步。”
论文合著者戴伟博士是生物纤毛方面的专家,他一直在研究生物模型生物莱茵衣藻的纤毛同步化问题。作为最近这项研究的一部分,他评估了机器人系统在实验中重现纤毛行为的潜力。
杨说:“为了了解锚定 HEXBUG 链有趣动力学的机械基础,我们构建了一个基于连接自推进粒子的简化理论模型。”“随后,夏一鸣在广泛的系统参数范围内进行了布朗动力学模拟,成功重现了实验观察结果。”
Xia 运行的模拟用于模拟系统中不同步态之间的竞争和过渡,同时准确预测其热力学。这反过来又可用于探索可能控制纤毛行为进化的能量规则,特别是不同同步步态如何竞争和产生能量。
杨说:“经过一些尝试,我们认识到当前的简单系统向能量耗散最大的稳定状态(即最大熵产生率)演变。”
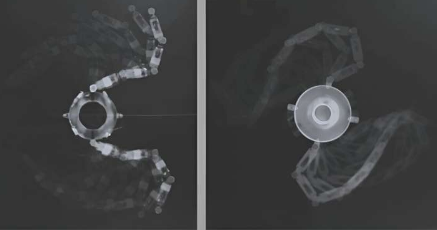
该研究团队创建的模型系统由一系列微型机器人(称为 HEXBUG 机器人)组成,它们相互连接形成链条。为了连接机器人,研究人员使用了一些他们用 3D 打印技术制作的盖子。这些盖子上的接头决定了相邻的 HEXABUG 机器人可以弯曲的最大角度。这个角度最终控制系统产生的纤毛摆动运动的波形。
在将两条链条锚定在同一个基座上(类似于藻类细胞体)并在基座上加载不同的重量后,杨和他的同事发现,摩擦力越大(重量越大)越会阻碍链条的同步能力。此外,他们将人造纤毛状系统的电源改为外部直流电源。这使他们能够控制系统的有效驱动力,该驱动力与施加的电压有关。
“这些实验系统在模拟中得到了很好的建模,”杨说。“HEXBUGS 被抽象为自推进杆,它们的机械相互作用由连接弹簧捕获,底座的摩擦力和主动驱动力是两个主要控制参数。在系统地描述模拟系统并用实验结果作为基准后,我们确信模拟抓住了真实装置的本质。”
作为研究的一部分,该团队在模拟和实验环境中部署了他们的系统。模拟系统为他们探索系统参数空间提供了巨大的可能性,从而对步态转换和基础物理学做出了详细的预测。
杨解释说:“模拟使得能量计算成为可能,而这不可能通过实验准确计算。”
杨和他的同事成功开发了一个控制平台,可用于研究纤毛中观察到的机械介导同步行为。未来,他们提出的系统可以被世界各地的其他研究人员使用,以进一步加深对纤毛及其潜在物理特性的理解,而这通常很难通过实验进行探索。
杨说:“该平台可用于以受控方式实现和研究复杂的纤毛行为。” “这可能有助于研究纤毛同步的生物物理学家测试他们的工作假设。”
对于这个特定的系统,研究人员发现,在两种可能的状态中,它通常倾向于耗散性更强的状态。这表明,至少一些非平衡系统的演化可能朝着最大能量耗散的方向发展。
杨补充道:“我们相信这对于寻求非平衡系统一般原理的研究人员来说将会很有趣。”
“我们现在正在研究一种解析模型,以便更好地解释机械连接的纤毛摆动行为。同时,我们也在研究更复杂的场景,例如多个纤毛之间的同步。通过这些进一步的研究,我们希望找出非平衡稳态系统有利于更强耗散状态的必要条件。”
声明本站所有作品图文均由用户自行上传分享,仅供网友学习交流。若您的权利被侵害,请联系我们