准确实时预测附近车辆的运动或行人的未来轨迹对于安全自动驾驶至关重要。香港城市大学(城大)领导的研究团队最近开发了一种新颖的人工智能系
准确实时预测附近车辆的运动或行人的未来轨迹对于安全自动驾驶至关重要。香港城市大学(城大)领导的研究团队最近开发了一种新颖的人工智能系统,该系统可以提高密集交通中的预测准确性,并将计算效率提高85%以上,为增强自动驾驶汽车的安全性提供了巨大潜力。
领导这项研究的城市大学计算机科学系王建平教授解释了自动驾驶中精确、实时预测的至关重要性,并强调即使是最小的延迟和错误也可能导致灾难性事故。
然而,现有的行为预测解决方案通常难以正确理解驾驶场景或预测效率低下。这些解决方案通常涉及每当车辆及其观察窗向前移动时对周围物体和环境的最新位置数据进行重新归一化和重新编码,即使最新位置数据与之前的数据基本重叠。这导致实时在线预测中出现冗余计算和延迟。
为了克服这些限制,王教授和她的团队提出了一种突破性的轨迹预测模型,称为“QCNet”,理论上可以支持流处理。它基于相对时空原理进行定位,赋予了预测模型“空间维度旋转平移不变性”、“时间维度平移不变性”等优良特性。
这两个属性使得从驾驶场景中提取的位置信息是唯一且固定的,而不管观看者在观看驾驶场景时的时空坐标系如何。这种方法允许缓存和重用先前计算的坐标编码,从而使预测模型理论上能够实时运行。
该团队还将道路使用者、车道和人行横道的相对位置纳入中,以捕捉他们在驾驶场景中的关系和互动。增强了对道路规则和多个道路使用者之间交互的理解,使模型能够生成无碰撞预测,同时考虑到道路使用者未来行为的不确定性。
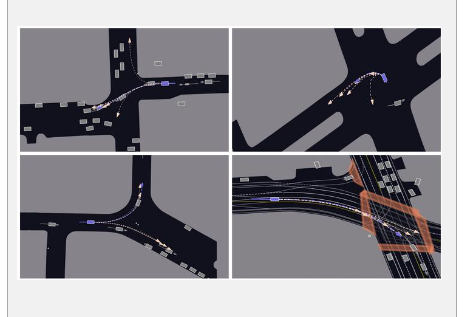
为了评估 QCNet 的功效,该团队利用了“Argoverse 1”和“Argoverse 2”,这是两个大规模的开源自动驾驶数据和来自美国不同城市的高清地图的集合。这些数据集被认为是行为预测最具挑战性的基准,包含超过 320,000 个数据序列和 250,000 个场景。
在测试中,QCNet 展示了预测道路使用者未来运动的速度和准确性,甚至可以进行长达六秒的长期预测。在Argoverse 1上的333种预测方法和Argoverse 2上的44种方法中排名第一。此外,QCNet将在线推理延迟从8ms显着降低到1ms,在涉及190名道路使用者和169张地图的最密集交通场景中,效率提高了85%以上多边形,例如车道和人行横道。
教授表示:“通过将这项技术集成到自动驾驶系统中,自动驾驶汽车可以有效地了解周围环境,更准确地预测其他用户的未来行为,做出更安全、更人性化的决策,为安全自动驾驶铺平道路。”王. “我们计划将这项技术应用于自动驾驶的更多应用,包括交通模拟和类人决策。”
该研究成果在今年于加拿大举行的计算机视觉领域颇具影响力的年度学术会议“IEEE/CVF计算机视觉与模式识别会议”(CVPR 2023)上以“Query-Centric Trajectory Prediction”为题发表。
声明本站所有作品图文均由用户自行上传分享,仅供网友学习交流。若您的权利被侵害,请联系我们